Shruti Garg
Hello there,
I'm Shruti 👋
Welcome to my corner of the Internet! 👋
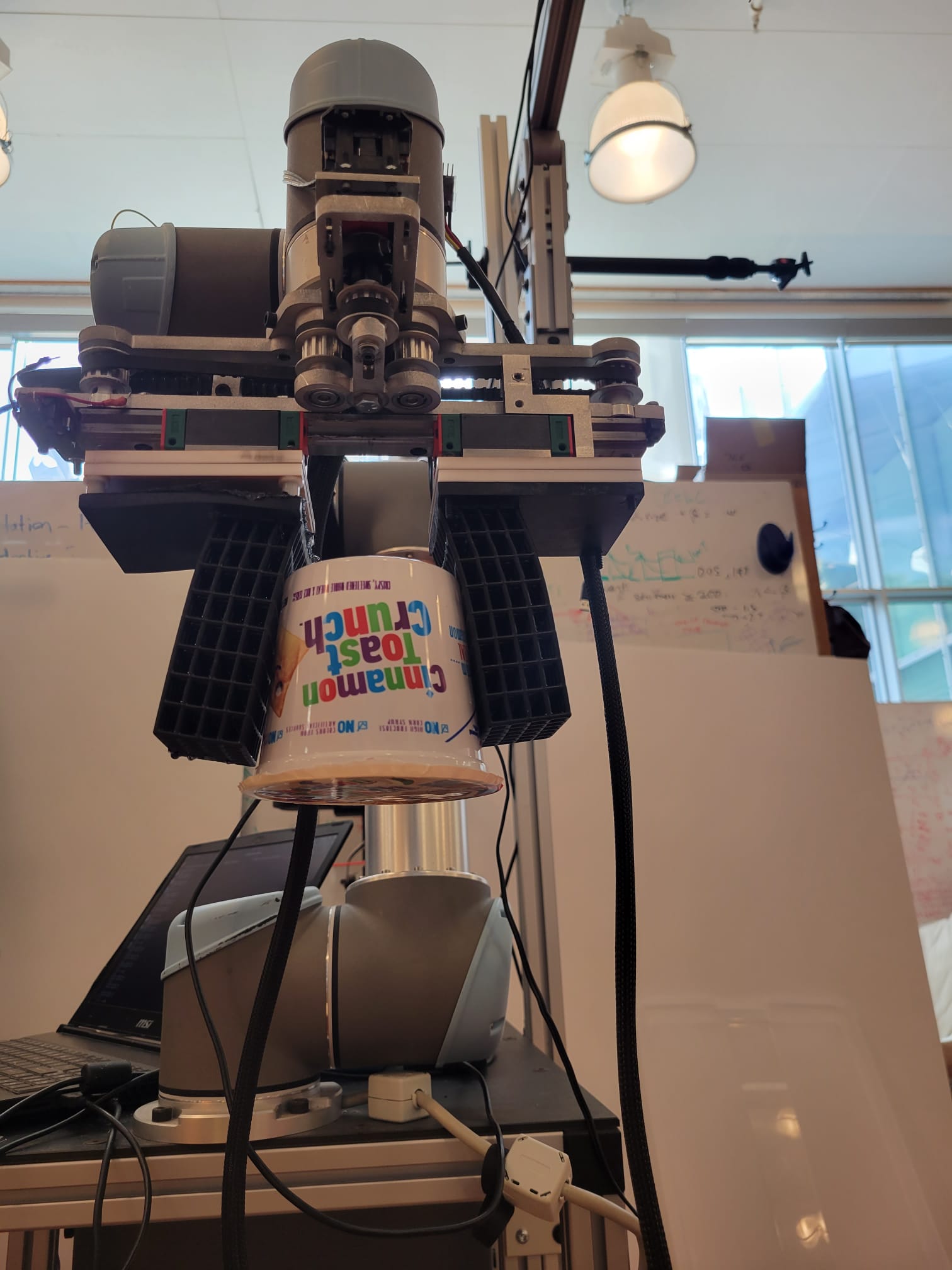
I'm a M.Eng student at MIT CSAIL, studying robotic manipulation and motion planning with the Robot Locomotion Group, advised by Russ Tedrake. I love all things robotics, and recently I have found my research focusing on motion planning and control. Previously, I have also interned at NVIDIA and Anduril.
When I'm taking a break from my robots, I enjoy capturing motion in photographs, exploring new places, and eating good food. I hope to have an ongoing collection of my photographs up soon!